
Design du Robot-Stockeur (Plan,maquette)
Ce robot a pour but de proposer une aide pour les employés d'usine grâce à son fonctionnement.
Les roues assurent la mobilité, les capteurs sont situés sur la face du robot et la boîte contient le moteur.
Le fonctionnement de la machine est simple grâce à ses bras articulés et ses barres permettant le glissement des bras.
Pour prendre le colis, le robot le saisi grâce à ses articulations sur les côtés. Ensuite les barres du dessous se positionnent en dessous de l'objet.
Pour résumer 4 articulations saississent l'objet, ce qui assure la stabilité et le transport sans danger.
En quoi cette machine répond aux critères du robot-stockeur ?
Dans un premier temps le robot contiendra des capteurs et un algorithme conçu pour répondre à la fonction principale et technique. Il disposera d'une batterie avec une autonomie de 24h, mais aussi d'une alarme en cas de choc.
Enfin sa structure optimale est adaptée à tous les critères et sa performance est irréprochable d'un point de vue efficacité, énergitique et dimensionnel.




Fonctions et diagramme pieuvre du Robot-Stockeur
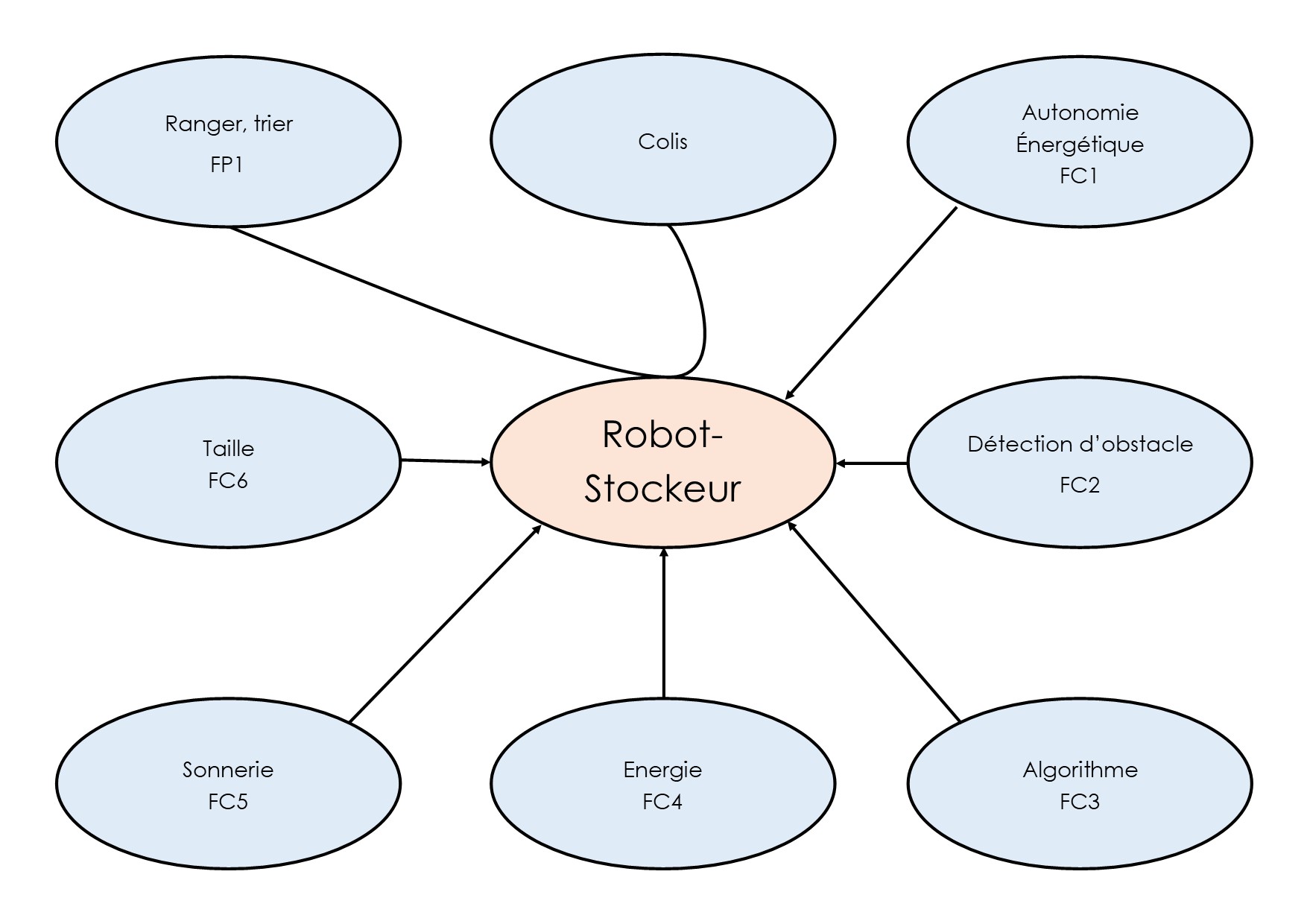
| Fonction | Critère | Niveau | |
| FP1 | Ranger et trier des colis | Déplacer les colis, les différencier. | 100m de sa borne de recharge |
| FC1 | Avoir une autonomie | Energie suffisante | 24h d'autonomie |
| FC2 | Avoir un capteur pour détecter un obstacle | Eviter l'obstacle | 30 cm de l'obstacle |
| FC3 | Avoir un système d'exploitation | Soit sans faille, défaut | |
| FC4 | Utiliser de l'énergie éléctrique | Consomme peu | 80 kwh |
| FC5 | Sonner | Volume puissant | 70 dB |
| FC6 |
Avoir un volume |
Qui est assez grand pour être capable de porter un colis | 1mx1mx1m |
Prototype Robot-Stockeur
Présentation
Nous voudrions envisager un prototype afin de répondre à votre demande.
Pour ce faire nous avons crée un robot-stockeur, comme son nom l'indique il permet de ranger des objets par exemple des colis de tout type dans une zone à déchargement.
Son fonctionnement est très simple:
-Il sera démarré par un opérateur (Exemple: Ordinateur, Serveur,...)
-Le robot, quand il commencera son cycle, devra saisir le colis et en fonction de son poids il devra se rendre sur l'aire de déchargement adaptée au colis saisi. Une fois le colis déposé, le robot devra retourner à sa position initiale pour recommencer un nouveau cycle.
-Si le robot ne parvient pas à détecter un colis ou tout simplement qu'il n'y en ait pas il ira dans une place de stationnemnt pour ne pas gêner prévue à cet effet.
Enfin le robot lorsqu'il croisera un obstacle (Humain, Obstacle quelconque) s'arrêtra et dans ce cas le robot émettra un signal sonore alertant la présence d'un obstacle puis reprendra son chemin une fois l'obstacle parti.

L'Equipe des Boulets